Virtual Labs
IIT Kharagpur
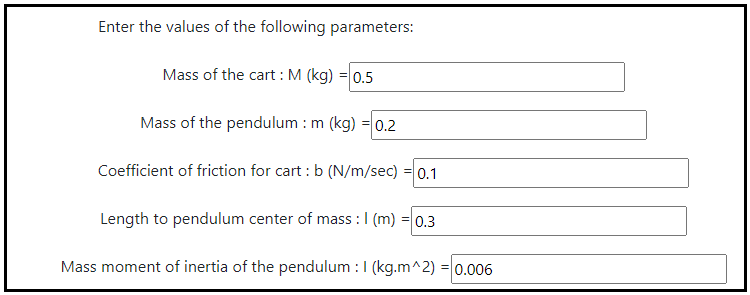
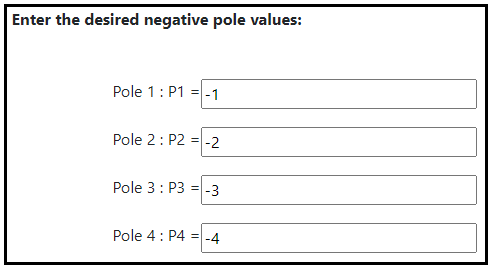
Control Design via Pole Placement for an Inverted Pendulum on a Cart with Pre-Compensator Design
Virtual Labs
IIT Kharagpur
Control Design via Pole Placement for an Inverted Pendulum on a Cart with Pre-Compensator Design
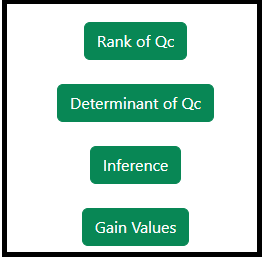
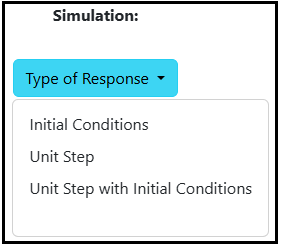
Steps to perform the simulation