Enter the values of the DC motor parameters. Note: Default values are already given.
Click on 'State Space Model' button to get the state space form of the system.
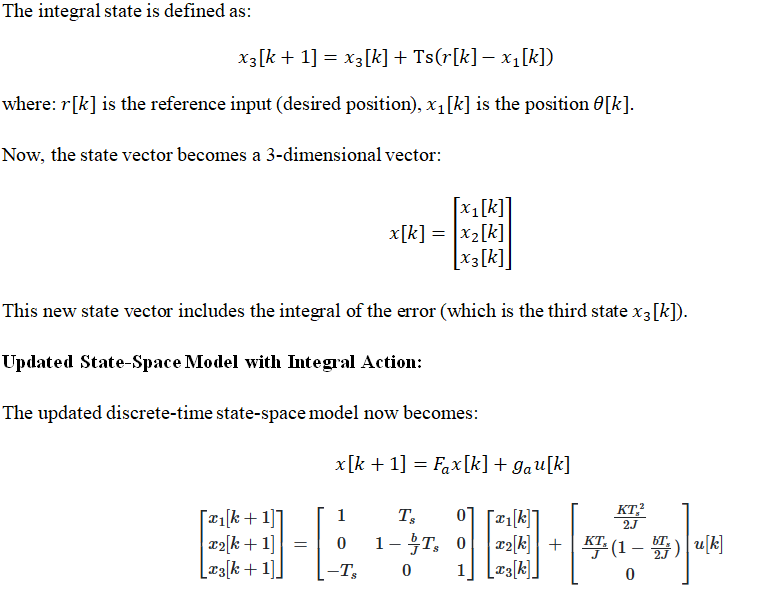
Click on ' Adding Integral State for PID control' button to get the augmented matrices.
Click on ' Enter the desired pole location' button to enter desired pole values.
Enter the desired negative pole values (in s domain).
Clicking on 'Design' dropdown-menu to select the type of the design.
Click on the desired option to select the required type of the design.
Click on the 'Run' button to run the selected design.
Click on the 'Rank' or 'Determinant' or "Inference' or 'Gain Values' buttons to get the controllability test information and state feedback gain values.
Click on the 'Closed Loop Response' button to get the plot.
Click on 'Download' button to download the plot.
Click on 'Clear' button to enter the new values of quantities.
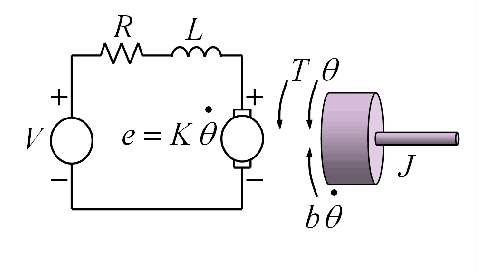
Fig.1. DC Motor Model
The DC motor dynamics:
The DC motor dynamics are represted by the following equation:
$$ J\ddot{\theta}(t)+b{\dot\theta}(t)=K V(t) $$
where,
J is the motor inertia, b is the damping coefficient, K is the motor constant, θ(t) is the angular position of the motor, V(t) is the input voltage (control input u(t)).
Enter the values of the following quantities:
Motor inertia : J= Damping ratio : b= Motor constant : K= Sampling Time (sec) : Ts=
where, Ts is the sampling time.
State Space Model of the DC Motor
Adding Integral State for PID control
Enter the desired negative pole values (in s domain):