Virtual Labs
IIT Kharagpur
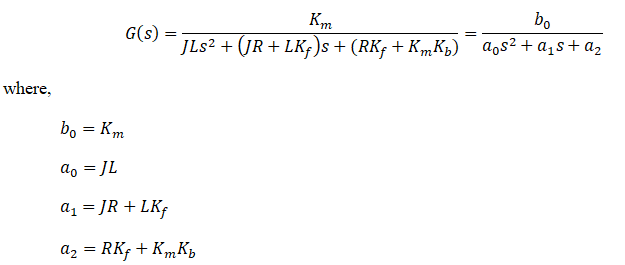
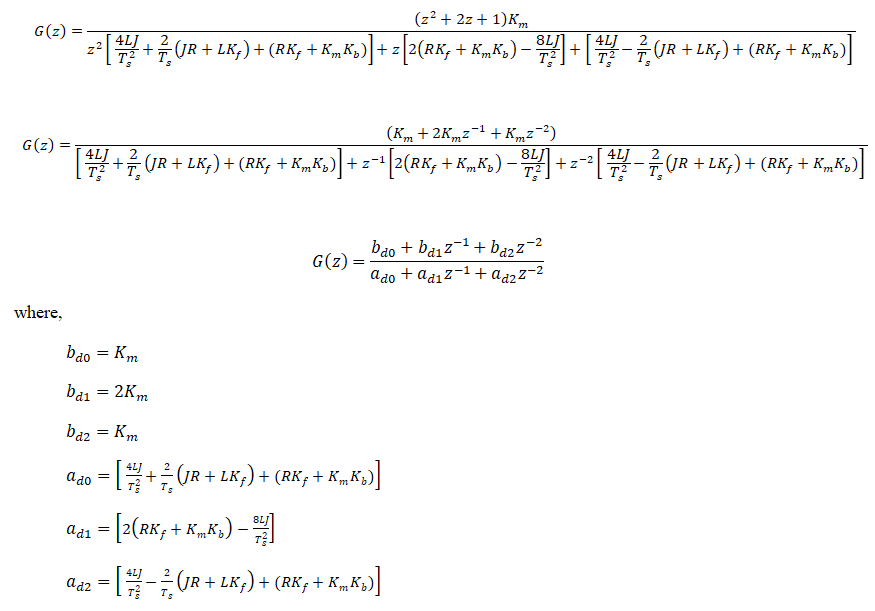
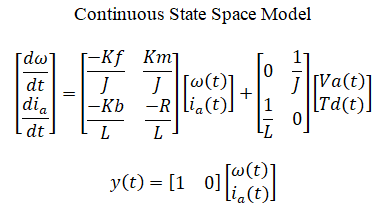
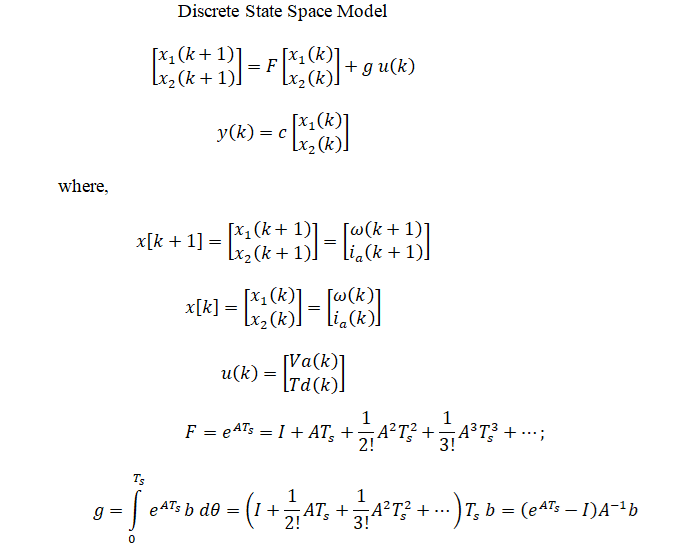
Determine the Pulse Transfer Function and State Space Model of the DC Motor
Virtual Labs
IIT Kharagpur
Determine the Pulse Transfer Function and State Space Model of the DC Motor