Virtual Lab on Robotics and Control
Sponsored by Ministry of Human Resource and Development, INDIA.Indian Institute of Technology Kharagpur
Sponsored by Ministry of Human Resource and Development, INDIA.Indian Institute of Technology Kharagpur
Mechanisms are used in variety of fixed motion generation applications in Engineering, where as Robots are used in applications where programmable motion is required. This Laboratory provides a basic exposure to design and control of such motion control applications in various applications. Ranging from 2D planar mechanisms to that of spatial mechanism design a set of experiments are offered concerning position, velocity and acceleration synthesis and analysis for basic motions. In addition some basic mechatronic control methods using a common Lab PC and USB interface to control motion generating devices like stepper motor and servo motor are offered. These are further augmented with real robot control as applied in fixed base manipulators to that of moving base robots.
The Slider-crank mechanism is used to transform rotational motion into translational motion by means of a rotating driving beam, a connection rod and a sliding body. In the present example, a flexible body is used for the connection rod. The sliding mass is not allowed to rotate and three revolute joints are used to connect the bodies. While each body has six degrees of freedom in space, the kinematical conditions lead to one degree of freedom for the whole system.
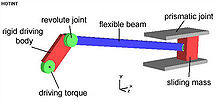
A slider crank mechanism converts circular motion of the crank into linear motion of the slider. In order for the crank to rotate fully the condition L> R+E must be satisfied where R is the crank length,L is the length of the link connecting crank and slider and E is the offset of slider. A slider crank is a RRRP type of mechanism i.e. It has three revolute joints and 1 prismatic joint. The total distance covered by the slider between its two extreme positions is called the path length. Kinematic inversion of slider crank mechanisms produce ordinary a whitework quick return mechanism.
The motion of the mechanism can be viewed in the following gif animation:
Below is a picture of the GUI as it would appear on the users screen :

Here is the link to the pdf file:
Here is the link to the MATLAB file :