Virtual Lab on Robotics and Control
Sponsored by Ministry of Human Resource and Development, INDIA.Indian Institute of Technology Kharagpur
Sponsored by Ministry of Human Resource and Development, INDIA.Indian Institute of Technology Kharagpur
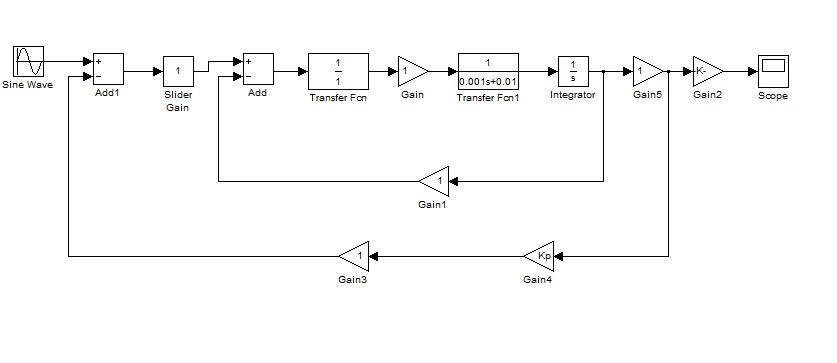
The modeling and control is achieved by the software MATLAB/SIMULINK.
>> v=10;
>> angle=90;
>> Kp=v/angle;
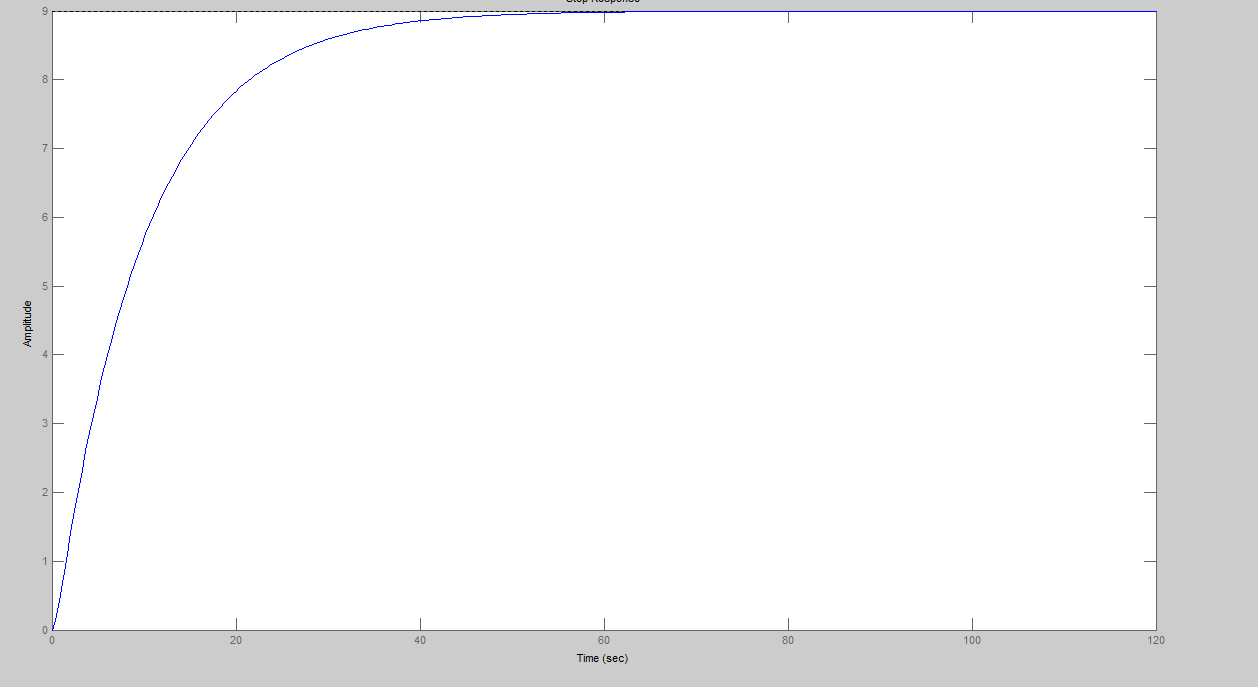
>>G=tf([1],[0.4177 1.11 0]);
>> sysclose=feedback(G,Kp);
>> step(sysclose);
The step response of the position feedback is shown. It is steady.