CLOSED LOOP CHARACTERISTICS OF DC MOTOR WITH PROPORTIONAL-DERIVATIVE-INTEGRAL CONTROL(DISCRETE-TIME)
Aim
To study the closed loop characteristics of DC motor Proportional, derivative and integral control(Discrete-Time) and experiment it with Matlab simulation File
CLOSED LOOP CHARACTERISTICS OF DC MOTOR
PROPORTIONAL-DERIVATIVE-INTEGRAL CONTROL (DISCRETE-TIME)
The analysis for designing a digital implementation of a PID controller in a Microcontroller (MCU) or FPGA device requires the
standard form of the PID controller to be discretised. Approximations for first-order derivatives are made by backward finite
differences.
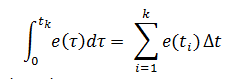
The integral term is discretised, with a sampling time

t,as follows,
The derivative term is approximated as:
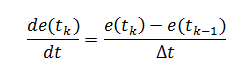
which gives us:

In the Matlab/Simulink model of
PID Control given below, we have used Ideal PID Controller in
discrete time.
PLEASE NOTE THAT THE MATLAB/SIMULINK VERSION USED IS 7.10.0.499 (R2010a)
The images of the model along with the corresponding speed profile are given below.
Simulink Model for PID control(discrete time) of DC motor system: