Virtual Lab on Robotics and Control
Sponsored by Ministry of Human Resource and Development, INDIA.Indian Institute of Technology Kharagpur
Sponsored by Ministry of Human Resource and Development, INDIA.Indian Institute of Technology Kharagpur
Aim
To study the closed loop characteristics of DC motor with Proportional control and experiment it with Matlab simulation File
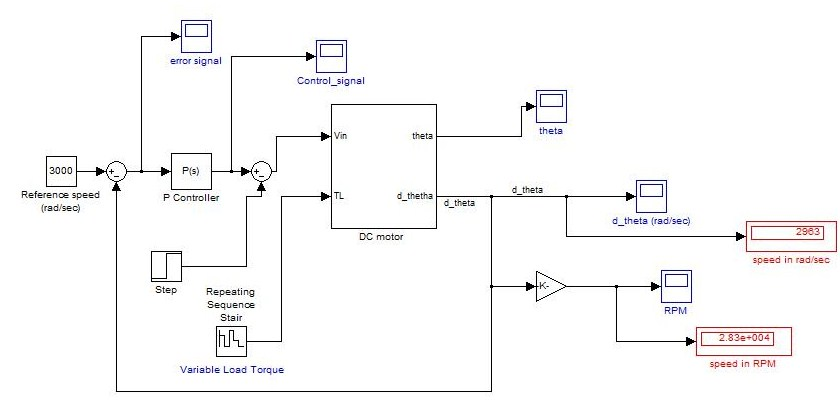
The DC motor model for Proportional Control has been created using Matlab/Simulink.
Proportional control
PLEASE NOTE THAT THE MATLAB/SIMULINK VERSION USED IS 7.10.0.499 (R2010a)
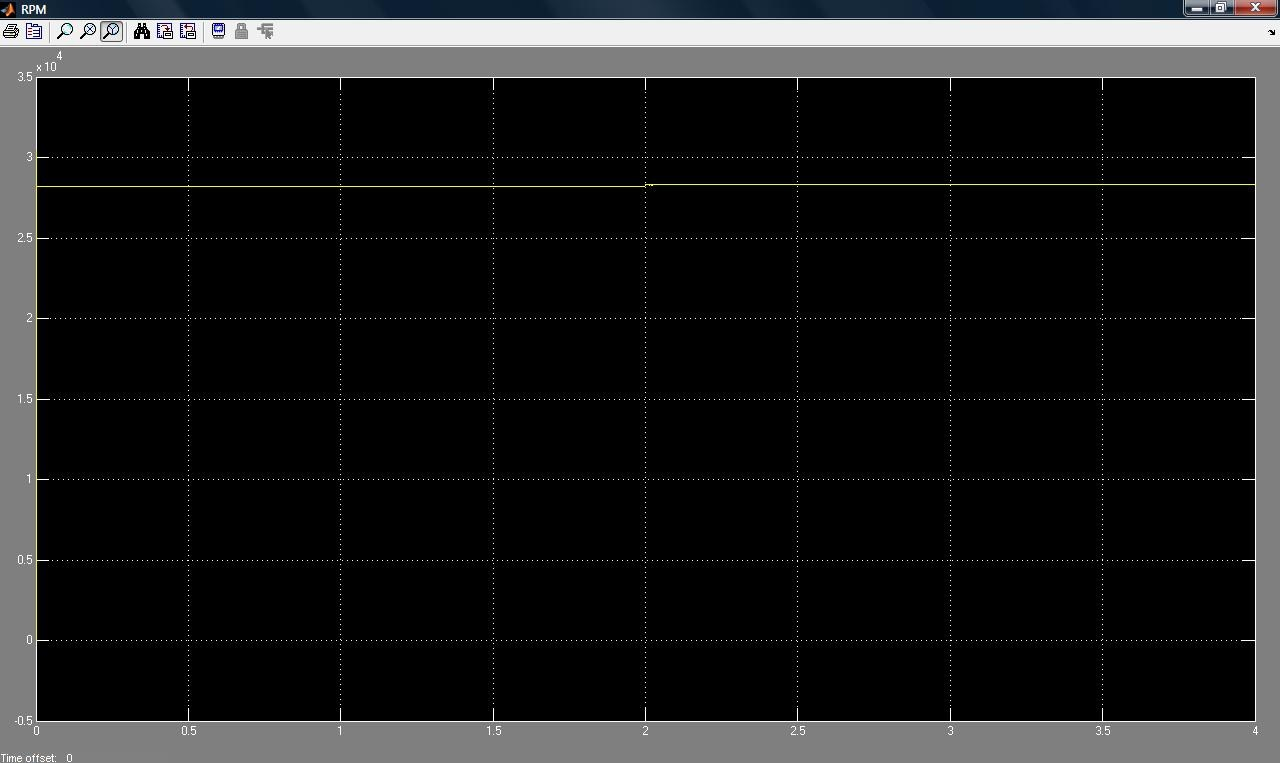
The images of the models along with the corresponding speed profiles are given below.
Simulink Model for Proportional control of DC motor system: