Virtual Lab on Robotics and Control
Sponsored by Ministry of Human Resource and Development, INDIA.Indian Institute of Technology Kharagpur
Sponsored by Ministry of Human Resource and Development, INDIA.Indian Institute of Technology Kharagpur
Mechanisms are used in variety of fixed motion generation applications in Engineering, where as Robots are used in applications where programmable motion in required. This Laboratory provides a basic exposure to design and control of such motion control applications in various applications. Ranging from 2D planar mechanisms to that of spatial mechanism design a set of experiments are offered concerning position, velocity and acceleration synthesis and analysis for basic motions. In addition some basic mechatronic control methods using a common Lab PC and USB interface to control motion generating devices like stepper motor and servo motor are offered. These are further augmented with real robot control as applied in fixed base manipulators to that of moving base robots. To show how a fixed repetitive motion path in a 2-D space that can be generated by a simple closed chain mechanism using a single input. The motion of a point in any of the links in the mechanism can be mapped to that of the input given. User learns the various aspects of motions generated in such mechanisms through a series of visual simulations that can be carried out by varying its basic parameters..
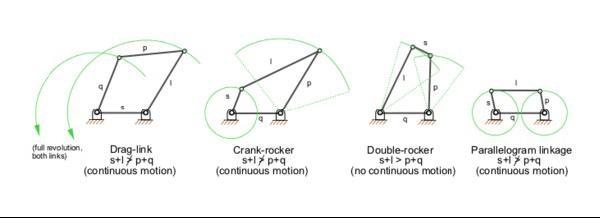
In a four bar mechanism the link on which input motion is applied is known as driver.The output motion link is follower and the middle link
connecting these two links is coupler link.The fourth link is grounded.A four bar mechanism has 1 degree of freedom .
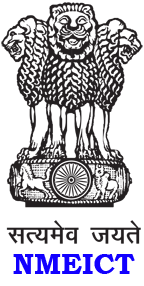
If the input link can rotate fully it is called as crank.A link that can't rotate fully is known as rocker.
| Position of shortest link | Type of mechanism | |
| 1 | If S is the ground link | double crank mechanism |
| 2 | If S is the side link | crank rocker mechanism |
| 3 | If S is the coupler link | double rocker mechanism |
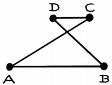
If the input and output link intersect in a plane,then the fourbar mechanism is said to be in crossed configeration else the mechanism is said to be
in open configuration.
| Open four bar mechanism | Crossed four bar mechanism |
|
|